Lab Experiment > Electronic HW8. University of California, Berkeley COMPSCI 188
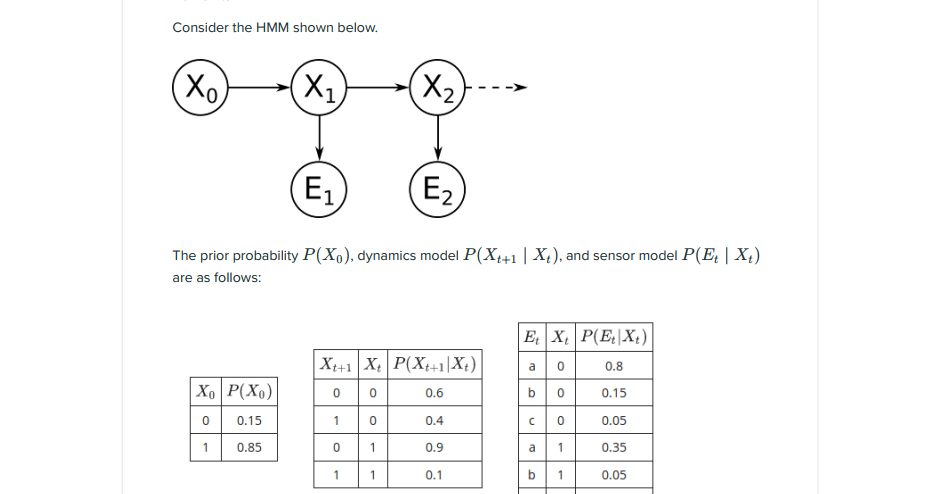
Electronic HW8.University of California, BerkeleyCOMPSCI 188Q1 HMMs, Part I20 PointsConsider the HMM shown below.The prior probability , dynamics model , and sensor modelare as follows:We perform a first dynamics update, and fill in the resulting belief distribution .We incorporate the evidence . We fill in the evidence-weighted distribution, and the (normalized) belief distribution .You get to pe ...[Show More]
Preview 1 out of 14 pages
Reviews( 0 )
| Category: | Lab Experiment |
| Number of pages: | 14 |
| Language: | English |
| Last updated: | 1 year ago |
| Downloads: | 1 |
| Views: | 14 |