Questions and Answers > You are modeling the robotic arm shown below. Treat each...
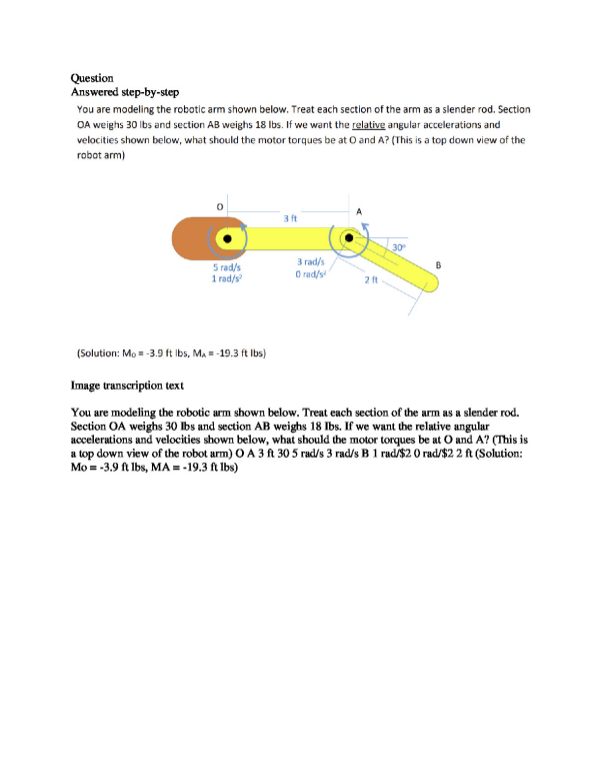
Temple University • ME • ME-2332 You are modeling the robotic arm shown below. Treat each section of the arm as a slender rod. Section OA weighs 30 Ibs and section AB weighs 18 Ibs. If we want the relative angular accelerations and velocities shown below, what should the motor torques be at O and A? (This is a top down view of the robot arm) O A 3 ft 30 5 rad/s 3 rad/s B 1 rad/$ ...[Show More]
Preview 1 out of 6 pages
Reviews( 0 )
| Category: | Questions and Answers |
| Number of pages: | 6 |
| Language: | English |
| Last updated: | 4 weeks ago |
| Downloads: | 1 |
| Views: | 0 |